
9��24����27�գ���27��IEEE ITSC 2024���ʻ����ڼ��ô��ɶ�¡���ٿ���DeepWay�������ܼ�ʻ�з��Ŷ��������������ύ�����ı�IEEE ITSC��ʽ���ɲ��ڻ��Ϸ�����
����������DeepWay�������ܼ�ʻ�з��ŶӾ���д����Ϊ��Real-time Optimization-based Path Planning for Autonomous Semi-trailer Trucks���������Ż���������ҿ���ʵʱ·���滮�����ڻ����ڼ䣬DeepWay�������ܼ�ʻ�����з����ĸ��ܼඡ�����ڶ�ר��ѧ�����һ�ã���ͬ��������һ�о��ɹ���

���������ҿ������ӵĶ���ѧ���ԣ������һ����ӱ�Ļ���ʵʱ�Ż���·���滮������ʹ�ÿ����ܹ������㰲ȫ��ǰ���¾����ܾ�����ʻ�����ܹ�������õ��Σ�����ͨ���ԡ����ַ����漰������ϵͳ���о�ȷ�Ľ�ģ���������г��ֺͽǵ��λ�ã���ʵ�ָ���ȷ��·���滮��ͬʱҲ��Ҫ����ģ�͵ĸ��ӳ̶Ȳ���Ӱ�쵽ʵʱ����⡣�Դˣ��Ŷӹ�����һ������ӲԼ������Լ����ϵ��Ż����⣬���ܹ�ʹ����ȷ������ײ�������ܾ��У�����Ҳ����������ijЩ����� (�缱�����խ��·) ��ʱ���������߽磬�Ӷ������ͨ��������
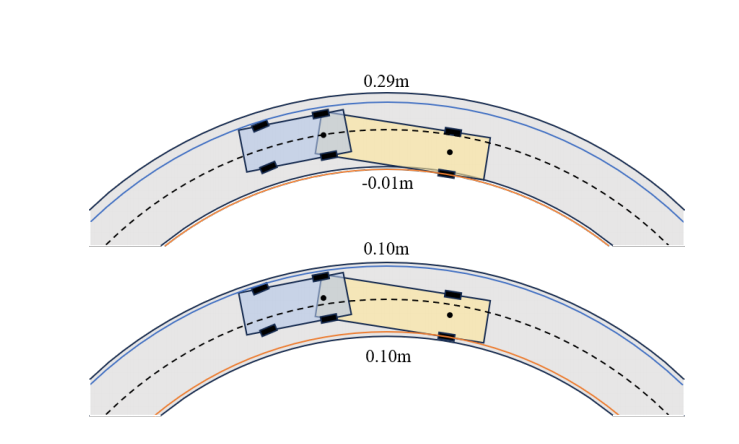
��ҿ�����������ʻ·������ʹǣ�����ҳ�������λ�ڳ����������ġ���ͼ���ϰ벿��Ϊһ����ó���·���滮������ʹ���ĺ����������ŵ�·������ʻ����������ʾ������ҿ�����˵�����ɫ�ߴ����Ĺҳ�ɨ����������������ͳ����˵�·�߽硣��ͼ�°벿��ΪDeepWay����������ʻ·����DeepWay�������ĺ�������������ƫ���·���ĵ��Ҳ࣬����ʹǣ������ҳ��������λ�ڵ�·�����ġ�
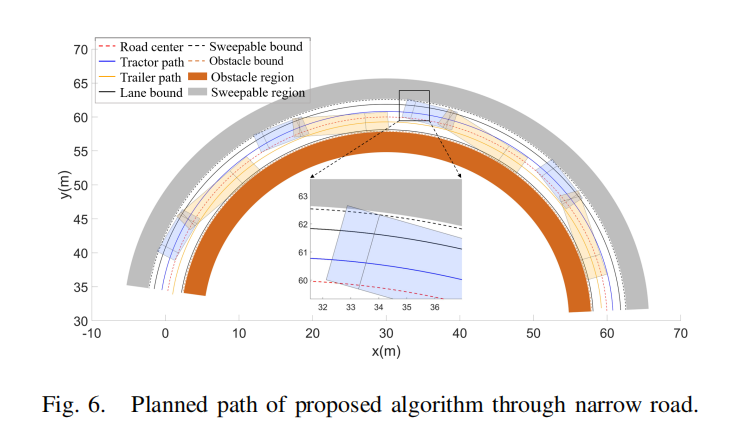
��ͼΪһ�����ӵ�խ·ͨ�а���������ɫ���ǵͰ��ϰ�����·�أ��ڲ��ɫ��Ϊ������ײ���ϰ�����Ͱ������ҿ���ת��ʱ���ҳ������������У����ܻ�Խ���������ߣ��ر����ڼ�ת��ĵ�·�ϡ�DeepWay�����Ǽ��Ŷ�����ķ����ܹ���ǣ����ս���Ե��������ʻ������ǰ����һ����ɨ��·�ض���Ӱ�찲ȫ�����ֲ�����Ч��������·�صĵ��Σ��ȷ�ֹ�����ڲ�Ͱ����ײ���ַ�ֹ��ǣ������ǰ��ѹ��·���ϡ�
�˴Σ�IEEE ITSC������DeepWay�����Ǽ��Ŷ����λר��ѧ��չʾ��ȫ�»���ʵʱ�Ż��ĵ�·��ҿ���·���滮������������ģ���ʵ��ʵ��֤����DeepWay�����Ǽ��Ŷ�����ķ����߱���Ч����ʵʱ�ԣ��ڱ��Ϻͳ������з������������˳�����Ϊ��Ӯ�������α���ѧ�ߵĹ㷺��ע��
Ӳ�˵�רҵʵ���Ż��Ͽɣ���Ʒ��ؽ��̲��ϼ��١��ڿ������ܼ�ʻ��̽����·�ϣ�DeepWay����δ�������������Щ��ϲ����������Ŀ�Դ���




